Dir empfehlend entweder ordentlich zu schwimmen oder wie ein Mann abzusaufen,

Diskutieren Sie mit anderen Lesern über Physik und Philosophie
![]() von Yukterez » Mi 24. Jun 2015, 12:26
von Yukterez » Mi 24. Jun 2015, 12:26
![]() von fb557ec2107eb1d6 » Mi 24. Jun 2015, 12:38
von fb557ec2107eb1d6 » Mi 24. Jun 2015, 12:38
Ernst hat geschrieben:fb557ec2107eb1d6 hat geschrieben: Es geht hier um die Lösung der homogenen Wellengleichung für das elektrische Feld.
mit den Randbedingungen
Wenn du dir die Mühe machst die Lösung für das Problem zu rechnen, wirst du feststellen, dass genau die schon gezeigt Lösung herauskommt, ohne dass eine mystische Resonanzbedingung welcher Art auch immer erforderlich ist.
Die Konformität der Maxwellschen Gleichungen bezüglich der Invarianz der Nullstellen erfüllt die Resonanzbedingung nicht hinreichend.
![]() von Ernst » Mi 24. Jun 2015, 12:57
von Ernst » Mi 24. Jun 2015, 12:57
fb557ec2107eb1d6 hat geschrieben:Ernst hat geschrieben:fb557ec2107eb1d6 hat geschrieben: Es geht hier um die Lösung der homogenen Wellengleichung für das elektrische Feld.
mit den Randbedingungen
![]() von Yukterez » Mi 24. Jun 2015, 13:50
von Yukterez » Mi 24. Jun 2015, 13:50
Ernst wollte damit sagen:

![]() von Ernst » Mi 24. Jun 2015, 14:10
von Ernst » Mi 24. Jun 2015, 14:10
Yukterez hat geschrieben:Sinnerhaltend zusammenfassend,
![]() von Yukterez » Mi 24. Jun 2015, 14:43
von Yukterez » Mi 24. Jun 2015, 14:43
Chiefs Lehrmeister Ernst hat geschrieben:hast du die Resonanzbedingung der festen Knoten an den Enden im Meer versenkt

Chiefs Lehrmeister Ernst hat geschrieben:für fb... zur Erbauung
 ,
, 
![]() von Ernst » Mi 24. Jun 2015, 15:00
von Ernst » Mi 24. Jun 2015, 15:00
Yukterez hat geschrieben:Meine Knoten sind echte Fischerknoten, die halten sogar einem Tsunami stand:
![]() von Yukterez » Mi 24. Jun 2015, 15:04
von Yukterez » Mi 24. Jun 2015, 15:04
![]() von Yukterez » Mi 24. Jun 2015, 16:24
von Yukterez » Mi 24. Jun 2015, 16:24


(* Variablen *) v = c/2;
c = 1;
d1 = Sqrt[(c+v)/(c-v)];
d2 = 1/d1;
γ = 1/Sqrt[1-v^2/c^2];
λ = 2 π;
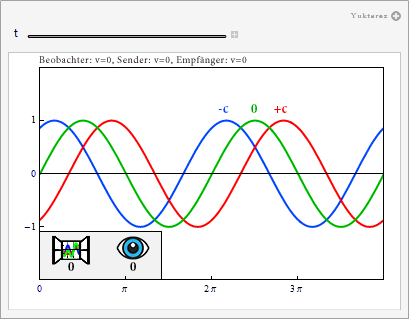
(* ruhendes Inertialsystem mit Fokus auf den ruhenden Sender *)
p1 = Manipulate[Plot[{
(* B *) Sin[x + c t],
(* R *) Sin[x - c t],
(* G *) Sin[x + c t] + Sin[x - c t],
2 Sin[x],
2 Sin[x + π]
}, {x, 0, 4 π},
Frame -> True,
PlotRange -> {{0, 4 π}, {-2, 2}},
GridLines -> {{π, 2 π, 3 π}, {}},
PlotStyle -> {Blue, Red, Green, Dashed, Dashed},
FrameTicks -> {{{-1, 0, 1}, None},
{{0, π, 2 π, 3 π}, None}}],
{t, 0, λ/c}]
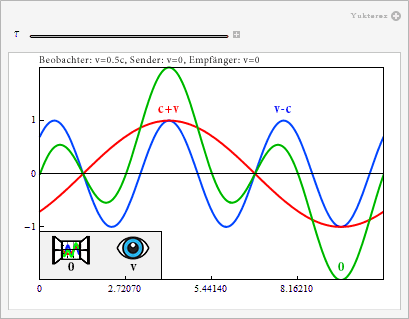
(* bewegtes Inertialsystem mit Fokus auf den ruhenden Sender *)
p2 = Manipulate[Plot[{
(* B *) Sin[d1 x + c τ/γ],
(* R *) Sin[d2 x - c τ/γ],
(* G *) Sin[d1 x + c τ/γ] + Sin[d2 x - c τ/γ],
2 Sin[x γ],
2 Sin[π + x γ]
}, {x, 0, 4 π/γ},
Frame -> True,
PlotRange -> {{0, 4 π/γ}, {-2, 2}},
GridLines -> {{π/γ, 2 π/γ, 3 π/γ}, {}},
PlotStyle -> {Blue, Red, Green, Dashed, Dashed},
FrameTicks -> {{{-1, 0, 1}, None},
{{0, N[π/γ, 6], N[2 π/γ, 6], N[3 π/γ, 6]}, None}}],
{τ, 0, λ/c γ}]
(* bewegtes Inertialsystem mit Fokus auf den bewegten Empfänger *)
p3 = Manipulate[Plot[{
(* B *) Sin[d1 x + c т d1],
(* R *) Sin[d2 x - c т d2],
(* G *) Sin[d1 x + c т d1] + Sin[d2 x - c т d2],
2 Sin[x γ + c т d2],
2 Sin[π + x γ + c т d2]
}, {x, 0, 4 π/γ},
Frame -> True,
PlotRange -> {{0, 4 π/γ}, {-2, 2}},
GridLines -> {Table[n π/γ - v т, {n, 1, 12}], {}},
PlotStyle -> {Blue, Red, Green, Dashed, Dashed},
FrameTicks -> {{{-1, 0, 1}, None},
{{0, N[π/γ, 6], N[2 π/γ, 6], N[3 π/γ, 6]}, None}}],
{т, 0, 2 λ/c/γ}] 
![]() von Ernst » Mi 24. Jun 2015, 16:44
von Ernst » Mi 24. Jun 2015, 16:44
Yukterez hat geschrieben:Nachdem hier eh nur noch gespammt
Mitglieder in diesem Forum: 0 Mitglieder und 21 Gäste

 ,
, 