Gluon hat geschrieben:In der Newtonschen Mechanik sind ideal starre Körper eine Näherung, die bei moderaten Beschleunigungen sinnvoll ist. Bei starken Beschleunigungen bricht auch in Newtonscher Mechanik diese Näherung zusammen. In der SRT gibt gar keine starren Körper. Auch nicht im Ruhesystem. Ihr geht hier davon aus, dass ein Körper auf magische Weise seine Länge ändert, sobald er beschleunigt wird. Das ist aber nicht der Fall. Die Beschleunigung ist zunächst einmal ein lokales Ereignis. An einem oder mehreren Punkten des Körpers wirkt eine Kraft, die diesem Punkt des Körpers beschleunigt. Diese Kraft wirkt mit einer durch die Schallgeschwindigkeit im Körper gegebenen Verzögerung auf die benachbarten Punkte des Körpers. Eine Bevorzugung des Ruhesystem eines Körpers in dem Sinne, dass der Körper in seinem eigenen Ruhesystem selbst bei Beschleunigung ideal starr ist, gibt es in der Physik nicht.
Sie vergessen die SRT, Gluon. Die SRT besagt, dass ein Körper, der in bezug auf das Inertialsystem S mit der Geschwindigkeit w>0 bewegt ist, in S kontrahiert erscheint. Kontrahiert gegenüber seiner Ruhelänge. Haben wir nun einen Körper K, der zunächst in S ruht und dort mit seiner Ruhelänge erscheint, und versetzen wir nun denselben Körper K in Bewegung, so dass er sich nach einer Weile geradlinig mit konstant w>0 bewegt, dann erscheint der Körper K in S nun kontrahiert. Das ist Aussage der SRT für den Fall, dass die Bewegungsänderung keine bleibenden Schäden hinterlassen hat.
Die Ursachen der Bewegungsänderung des Körpers brauchen uns gar nicht zu interessieren. Die SRT handelt auch gar nicht von den Ursachen der Bewegungsänderung. Sie beschreibt die reine Kinematik. Sie trifft Aussagen über die Geometrie des Körpers, der zunächst in bezug auf S ruht und später dann in bezug auf S mit konstant w>0 geradlinig bewegt ist, ganz ohne sich um die Ursachen der Bewegungänderung zu kümmern. Das tut sie genauso wie auch die galileische Kinematik dasselbe tut. Letztere besagt, dass der Körper starr bleibt, erstere besagt, dass eine geschwindigkeitsabhängig Kontraktion auftritt.
Ernst hat geschrieben:[@Gluon]
Da sind wir uns ja dann ganz einig.
Gluon hat geschrieben:Die von Faber erfundene Transformation von einem Newtonsystem in ein Einsteinsystem gibt es nicht.
Und darin auch.
Ich habe inzwischen herausgefunden, dass bei der Erstellung einsteinischer Szenen aus galileischen Szenen in ScænaSRT zumindest bei den rotierenden Körpern tatsächlich etwas nicht stimmt. Analysiert habe ich das Problem nicht, ich komme aber durch den anderen Ansatz auf andere Resultate. Anstatt galileische Szenen in einsteinische Szenen zu verwandeln, betrachte ich nun lieber ausschließlich einsteinische Szenen, in denen ein Körper zunächst ruht und nach Beschleunigung dann mit konstanter Geschwindigkeit geradlinig bewegt ist. Das gestaltet sich übersichtlicher und findet in einem einzigen inertialen Bezugssystem statt.
Die Auseinandersetzung mit der Animationssoftware hat eines deutlich gezeigt: Man kann nicht einfach eine galileische Szene mit fahrendem Panzer, rotierendem Speichenrad oder was auch immer nehmen, und diese als im Sinne der SRT gültige Szene nehmen. Denn dort bewegen sich unkontrahierte Körper lustig durch die Gegend, als hätten sie von Einstein nie etwas gehört.
Also nehmen wir eine Szene, in der die Körper zunächst ruhen. Da sind wir sicher, dass es sich um eine im Sinne der SRT gültige Szene handelt. Dann setzen wir die Körper in Bewegung. Der Einfachheit halber nehmen wir nur einen einzigen Körper und lassen ihn sich nur in x-Richtung bewegen. Beschleunigt der Körper in x-Richtung mit etwa x(t) = 0,5at^2, a=const>0 dann müssen wir die infinitesimale Scheiben des Körpers separat betrachten, da jede Scheibe eine andere Geschwindigkeit hat. Hätten die Scheiben alle dieselbe Geschwindigkeit, dann gäbe es keine Kontraktion. Scheiben in Bewegungsrichtung weiter vorne müssen langsamer sein als Scheiben in Bewegungsrichtung weiter hinten. Wir können nicht einfach x(t) = 0,5at^2 vorgeben. Wir müssen x(0,t) = 0,5at^2 für die Scheibe S0 vorgeben und dann schauen, wie x(l,t) für die anderen Scheiben Sl auszusehen hat. l bezeichnet dabei die relative Position in x-Richtung der Scheibe Sl in bezug auf die Scheibe S0 des ruhenden Körpers.
Bei einem galileisch beschleunigten Körper sieht das so aus:

- Gln-001.png (3.02 KiB) 5854-mal betrachtet
Zum Ortsvektor der Scheibe S0 addieren wir die Breiten dlambda aller Scheiben von S0 bis Sl, um den Ortsvektor der Scheibe Sl zu erhalten.
Bei einem einsteinisch beschleunigten Körper sieht das hingegen so aus:

- Gln-003.png (3.79 KiB) 5912-mal betrachtet
Zum Ortsvektor der Scheibe S0 addieren wir die Breiten dlambda aller Scheiben von S0 bis Sl, um den Ortsvektor der Scheibe Sl zu erhalten, wobei wir die Breiten dlambda mit dem Kehrwert des Gamma-Faktors multipizieren. Der Gamma-Faktor hängt dabei von der Geschwindigkeit der jeweiligen Scheibe ab.
Das Resultat sieht so aus:
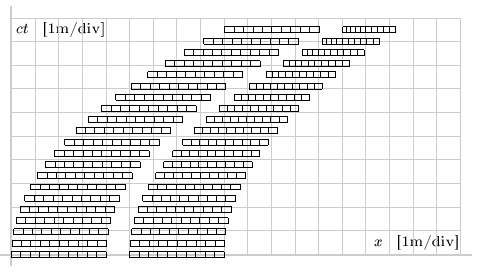
- Fig-001.png (8.82 KiB) 5877-mal betrachtet
Links im Bild ein galileisch mit a=const>0 beschleunigter Körper, der starr bleibt. Rechts im Bild ein einsteinisch mit a=const>0 beschleunigter Körper, der kontrahiert wird. Dabei wurde die infinitesimale Scheibe am linken Rand des Körpers vorgegeben, während die anderen Scheiben die in der Gleichung oben angegebene Kontraktionsbedingung einhalten. Die Kontraktion nimmt nach rechts hin ab, da die Geschwindigkeit nach rechts hin abnimmt. Das wiederum ist notwendig, damit der Körper überhaupt kontrahiert werden kann.
Das Bild zeigt natürlich keine infinitesimal dünnen Scheiben, ist aber exakt berechnet. Die oben angegebene Gleichung stellt so keine brauchbare Rechenvorschrift dar, da die zeitliche Ableitung auf der rechten Seite nicht bekannt ist, solange die linke Seite nicht bekannt ist. Durch Ableitung nach l lässt sich die Gleichung aber in eine nichtlineare Partielle Differentialgleichung erster Ordnung überführen. Damit ergibt sich ein Anfangswertproblem, bei dem der zeitvariable Ortsvektor einer der Scheiben die Anfangsbedingung darstellt. Die Lösung des Cauchy-Problems findet sich bei
Andrei D. Polyanin.
Beschleunigt man den Körper so, dass er sanft in eine gleichförmig geradlinige Bewegung übergeht, dann werden die Scheiben wieder alle gleich breit.
Gruß
Faber
P.S.: Ich hatte bereits früher ein ähnliches Bild gepostet, das die Sachlage aber nur qualitativ korrekt zeigt. Der dort zugrundeliegende Ansatz war falsch.
P.P.S:
Genaueres zur Sache.