Minkowski-Koordinatensystem.
Aus diesen Koordinaten der Entfernung wird ein Diagramm zusammengetragen, der aus der Raumkoordinate x und Zeitkoordinate t (die mit dem Lichtgeschwindigkeitsfaktor c skaliert wird) besteht.
Lichtgeschwindigkeit im Minkowski-Diagramm.Im Koordinatenursprung

erhalten wir:


Daraus folgt, dass wir für den Wert c eine Winkelhalbierende erhalten dadurch, dass jeder Einheit auf der Raumachse dieselbe Einheit auf der Zeitachse entspricht:
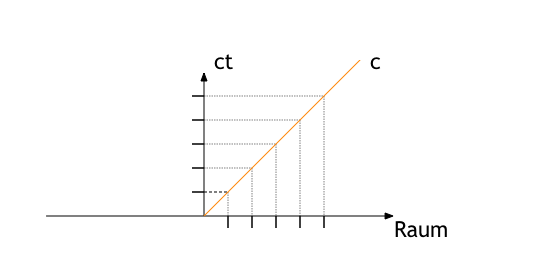
- IMG_5247.PNG (8.35 KiB) 1872-mal betrachtet
Symmetriesches Raum-Zeit Koordinatendiagram des Systems x mit dargestelltem Wert der Lichtgeschwindigkeit c.Worauf es in der Lorentztransformation ankommt, ist nun, dass sich die Raum- und Zeitkoordinaten des Systems B innerhalb von x anders verhalten als die des Systems x:
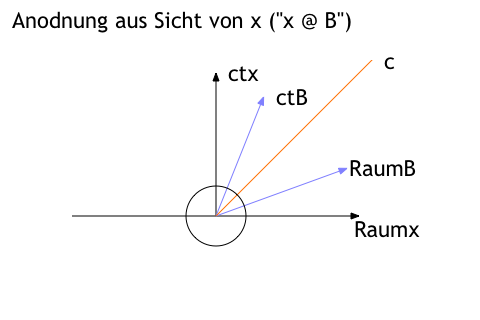
- IMG_5251.PNG (18.32 KiB) 1904-mal betrachtet
...und dass sich die Raum und Zeitkoordinaten des Systems x innerhalb des Systems B anders verhalten als die des Systems B:
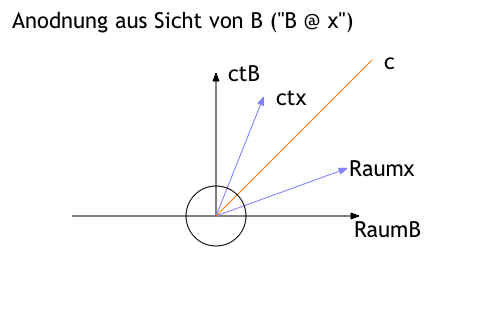
- IMG_5250.PNG (18.24 KiB) 1909-mal betrachtet
Wir stellen fest, dass die Lichtgeschwindigkeit in beiden Systemen durch eine Winkelhalbierende dargestellt ist (LG besitzt in beiden Systemen denselben Wert c) und damit dies der Fall sein kann, die Raum- und Zeitkoordinaten des Systems B aus Sicht von x und die Raum- und Zeitkoordinaten des Systems x aus Sicht von B
gegenseitig symmetrisch verzerrt sind.
(Einfachheitshalber werden hier die Perspektiven symmetrisch dargestellt)
Das Vokabular der Perspektivenlogik.Will ich nun die Perspektive des Bezugssystems x auf das Bezugssystem B beschreiben, so benutze ich das von mir im Buch "Perspektivenlogik" 2012


in die Logik eingeführte Zeichen "@" derart:
"x @ B"
Womit ich ausdrücke, dass das
betrachtete System das Bezugssystem B ist, und dass Betrachter von Bezugssystem x aus beobachtet und beschreibt.
"B @ x"
Womit ich ausdrücke, dass das betrachtete System das Bezugssystem x ist, und dass Betrachter von Bezugssystem B aus beobachtet und beschreibt.
Dadurch vereinfache ich erheblich die Form der systembezogener Beschreibung, worin sich auch der ganze Sinn der Operation ergibt: es lässt sich nun komplexe Beziehungen innerhalb der Bezugssystematik der SRT vereinfacht darstellen und beschreiben.
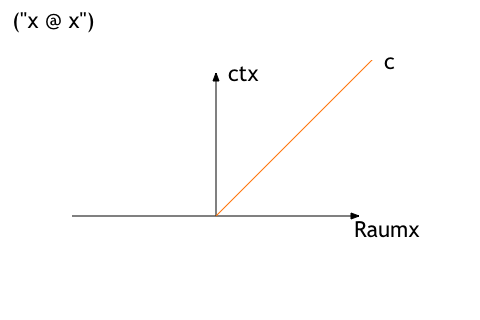
Perspektivenlogische Analyse: Minkowski-Diagramm.Gilt für
"x @ x": (Raumx = ctx); x ruhend
und für
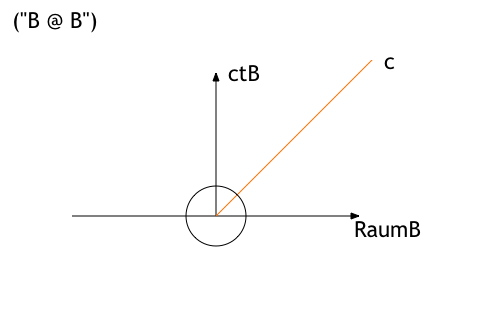
"B @ B": (RaumB = ctB); B ruhend
und gilt für
"x @ B": (RaumB+a) = (ctB+a); B bewegt
und gilt für
"B @ x": (Raumx+a) = (ctx+a); x bewegt
So gilt:
"x @ B" = "B @ x"
Beweis:
Wird von einem Intertialsystem x aus ein Inertialsystem B und
gleichzeitig von B aus x betrachtet, so ergibt sich für beide Beobachter dasselbe
symmetrische Bild.
Minkowski-Diagramm drückt eine Tautologie aus:
Beträgt der räumliche Abstand zwischen x und B zur Zeit t für
"x @ B" = 1, so beträgt derselbe für
"B @ x" ebenfalls 1.Voraussetzung:
Die Abstandssymmetrie ergibt sich selbstverständlich nur für ein und dieselbe
Gegenwart der Betrachtung @B und @x.
(Fazit: die Ursprünge beider Koordinanensysteme markieren notwendigerweise dieselbe Gegenwart - sonst würde sich die Abstandsymmetrie nicht ergeben).
Wenn t = ctx und wenn t' = ctB und wenn "x @ B"= "B @ x", dann notwendig t = t'
Die Gültigkeit der Abstandssymmetrie im Minkowski Diagramm ergibt sich nur dann tautologisch, wenn für betrachtete Systeme dieselbe absolute Gegenwart gilt.Wenn t = (a+1) und t' = (a-1) und wenn
(a+1): "x @ B" und (a-1): "B @ x" und wenn
"x @ B" = "B @ x", dann
t = t'.Daraus folgt der Widerspruch:
Das Minkowski-Diagramm soll ausdrücken, dass Zeit und Raum nicht absolut, sondern relativ und systemabhängig sind.
Raum und Zeit können aber nicht relativ und systemabhängig sein, wenn ein und dieselbe (absolute) Gegenwart systemübergreifend die Voraussetzung ihrer Relativität ist.Minkowski Diagramme sind Kappes.